In den bayerischen Produktionsstandorten der Hamburger Jungheinrich AG werden im „Stammwerk“ Moosburg Gegengewichtsstapler gebaut und im Moosburger Industriegebiet „Degernpoint“ Systemgeräte für innerbetriebliche Logistikprozesse. Das knapp vier Jahre junge Jungheinrich-Werk Degernpoint gilt als das derzeit modernste Werk für Lager- und Systemfahrzeuge.
Als eines der Gradmesser für die Qualität und die Leistungsstärke der Jungheinrich-Flurförderzeuge lässt sich unter anderem die hohe Exportrate heranziehen: Auf die Moosburger Werke bezogen, liegt sie bei etwa 90 Prozent. Dabei ist hervorzuheben, dass in diesem Jahr etwa 22.000 Gegengewichtsstapler gebaut werden und in Degernpoint rund 3.400 Lager- und Systemfahrzeuge. Gefertigt wird nach Kundenwunsch, was zum Teil eine Fertigung von Losgröße 1 bei hoher Effizienz bedeutet. Zu den Highlights zählen automatische Hochregalstapler, die Lasten auf eine Lagerfachhöhe von 17 m ablegen.
„Die im Moosburger Stammwerk gefertigten Gegengewichtsstapler“, erläutert Bernhard Petermaier, stellvertretender Leiter Werksdienste „werden wunschgemäß mit Elektro- oder Verbrennungsmotoren ausgestattet".
Optimierter Fertigungsfluss
„Wir“, erläutert Bernhard Petermaier weiter, „haben unsere Fertigung sowohl in Moosburg als auch in Degernpoint so aufgebaut, dass wir weitestgehend ohne Rüstzeiten fertigen. Dabei ist die Fertigungstiefe in Degernpoint höher als im Stammwerk. Generell werden die zu bearbeitenden Stahlteile und die Schienen für die Hubmasten aus einem automatisch arbeitenden Lager den Sägen beziehungsweise den Laserschneidanlagen zugeführt. Es folgt im Stammwerk das automatische Fräsen. Rüstzeiten, außer Werkzeugwechsel bei Verschleiß, fallen nicht an, da nur die Enden selbst bei unterschiedlich langen Schienen in gleicher Weise bearbeitet werden. In Degernpoint gibt es noch die mechanischen Bearbeitungstechnologien Drehen und Biegen für die Fertigung von Kleinteilen für Masten, Rahmen und Fahrerstand.“
Nach der Kommissionierung der Teile und Baugruppen werden die zu fügenden Teile positionsgerecht gespannt und geheftet. Die gehefteten Baugruppen werden in die IGM-Werkstückpositionierer eingespannt und dort automatisch geschweißt. „Gerade für die Baugruppen, die wohl am härtesten beansprucht werden beziehungsweise für die Sicherheit der Jungheinrich-Fahrzeuge unmittelbar verantwortlich sind“, bekundet Bernhard Petermaier, „realisieren wir hohe Qualitätsstandards durch das automatisierte Schweißen in den IGM-Roboterzellen. Dort fertigen wir Hubmaste, Chassis, Fahrerplattformen und Hubzylinder.“
Roboter in den Moosburger Jungheinrich-Werken
Seit über 30 Jahren liefert das österreichische Unternehmen IGM-Robotersysteme AG, das in diesem Jahr seinen 50. Geburtstag feiert, Roboterzellen nach Moosburg. Derzeit arbeiten im Stammwerk insgesamt 22 Einzelroboter in Roboterzellen, in denen sie allein oder Hand in Hand mit einem weiteren Roboter zusammenarbeiten. In Degernpoint sind es 11 IGM-Roboter. „Wir“, hebt Bernhard Petermaier hervor, „haben eine langjährige, sehr gut funktionierende Zusammenarbeit mit IGM aufgebaut, bei der sich die Kollegen gut verstehen und mit gegenseitigem Verständnis an die Lösung der anstehenden Aufgaben gehen. Als wir beispielsweise vor vier Jahren insgesamt 9 Roboteranlagen vom Stammwerk nach Degernpoint umsetzten, hat uns auch Martin Stettmeier, damals noch im IGM-Service tätig, tatkräftig unterstützt. Er war neun Monate jeden Tag vor Ort.“
Ausschlaggebend für die jahrzehntelange Zusammenarbeit war selbstverständlich die zuverlässige Qualitätsarbeit der IGM-Roboterzellen. Doch auch die regelmäßigen Schulungen der Bediener in der Kornwestheimer IGM-Roboter GmbH beziehungsweise in der IGM-Zentrale im Wiener Neudorf haben die gute Zusammenarbeit kontinuierlich gefördert. „Erst Ende letzten Jahres beziehungsweise zu Beginn 2017 haben wir“, berichtet Bernhard Petermaier weiter, „drei neue IGM-Roboterzellen erhalten. Wir achten stets darauf, dass unsere Roboter und ihre Steuerungen nicht älter sind als eine Generation vor der aktuellen Robotertechnologie.“
Leistungsstarke Roboterzellen
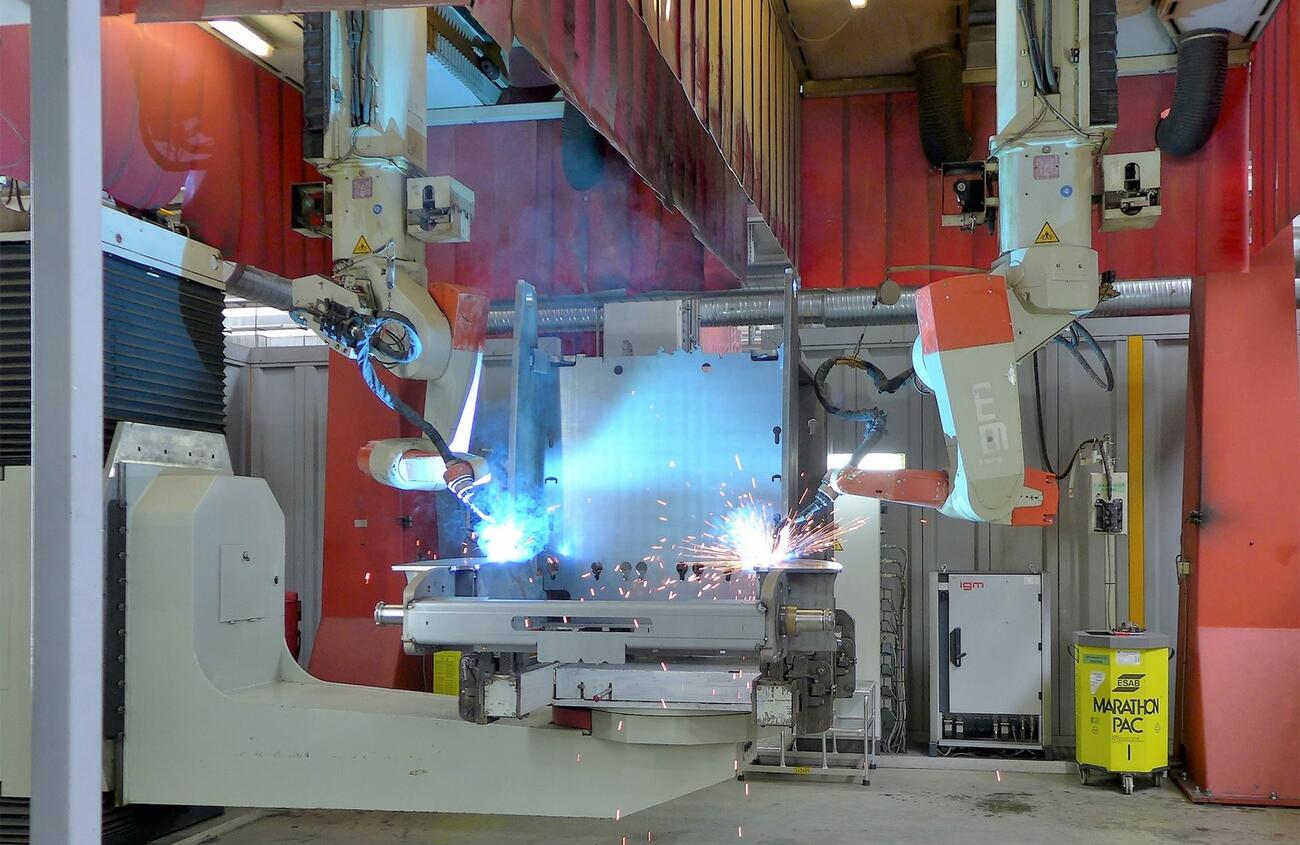
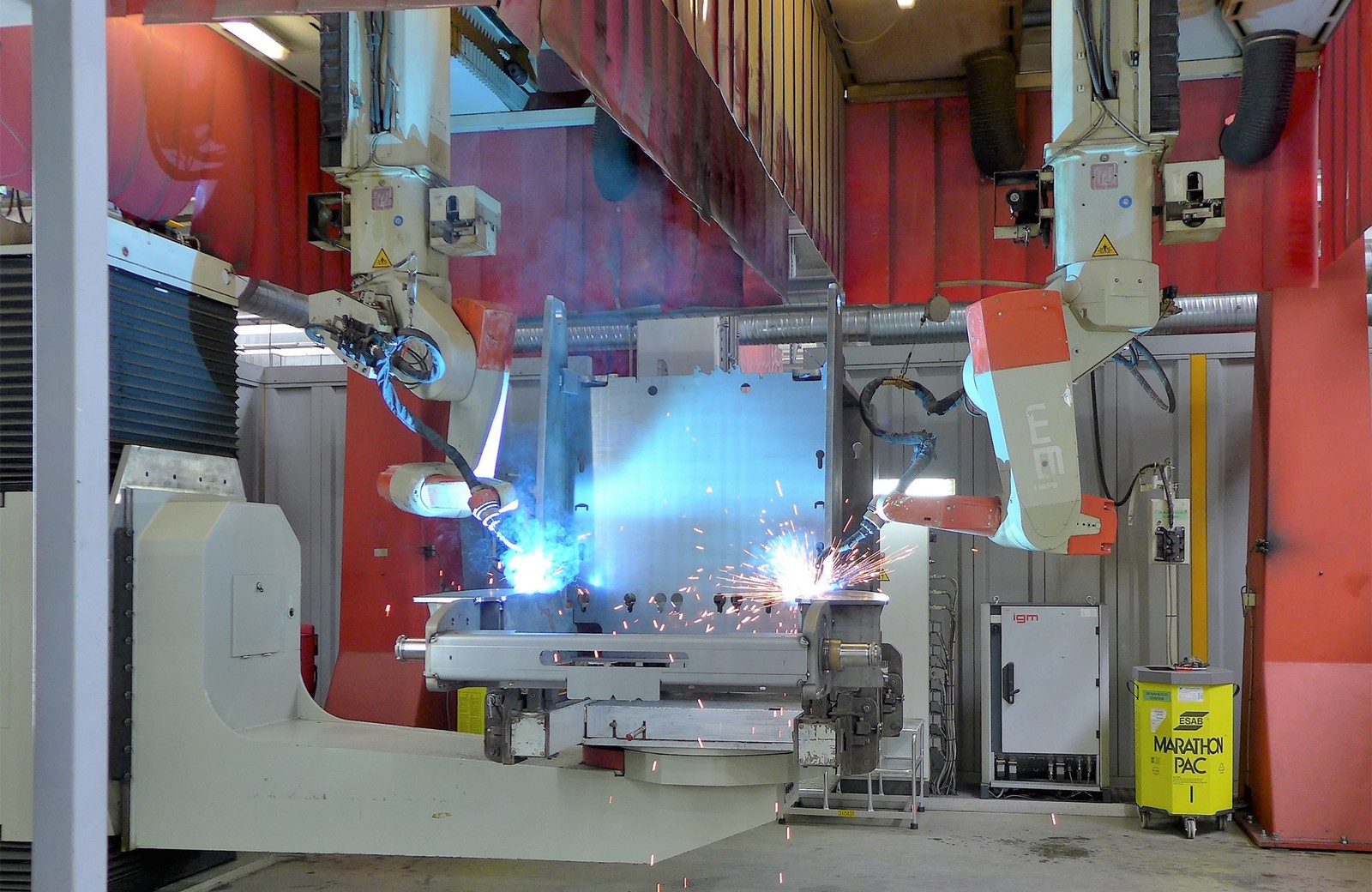
Von den 22 IGM-Robotern im Stammwerk arbeiten acht Stück in vier baugleichen Roboterzellen, die vorrangig Hubmasten schweißen. Unser Bild zeigt eine der beiden neuen Schweißzellen. Dort sind zwei Roboter der Baureihe RTE 400 installiert. Jeder der beiden Roboter hat seine eigene Steuerung und sein eigenes Programmierhandgerät. Die Steuerung der Bewegungen der Roboterachsen und der L-Positionierer, in die die Werkstücke eingespannt sind, erfolgt über die neueste von IGM entwickelte K6-Steuerung. Für jeden der beiden Roboter gibt es ein Bedienpanel und ein Programmierhandgerät der neuesten, K6-Generation. „Ausgerüstet mit 15“-Touchscreens“, erläutert Peter Scheichenbauer, Vertriebsleiter IGM-Robotersysteme GmbH, Kornwestheim, „bieten diese Bedienpanels eine übersichtliche Visualisierung der Anlage und der Betriebszustände. Über die Bedienpanels wählt der Bediener die Betriebsart aus, ruft die Arbeitsprogramme auf, startet den automatischen Schweißprozess oder stellt den Programmiermodus ein. In diesem Fall greift der Bediener zum Programmierhandgerät und programmiert Schweißzyklen oder aktualisiert sie. Die programmierten schweißtechnischen Abläufe werden auf einem Server abgelegt und stehen für die Fertigung gleicher Baugruppen jederzeit zur Verfügung. Die Programme lassen sich bei Konstruktionsänderungen problemlos aktualisieren. Das gilt auch für die Bewegungen der L-Positionierer. Sie sichern, dass die Schweißnähte der sicherheitsrelevanten Baugruppen stets in die vorgeschriebene Wannenlage positioniert werden.“
Über den Touchscreen des Bedienpanels erhält der Bediener Meldungen zum Anlagenstatus, aber auch Anzeigen zu Störungen des Schweißprozesses. Angezeigt werden beispielsweise Gas- oder Wassermangel sowie Lichtbogenprobleme oder Brennerabschaltung. Ebenso wird der Status der L-Positionierer abgefragt und angezeigt: Ist ein Werkstück vorhanden, gespannt oder nicht gespannt. Durch dieses Bedienpanel, mit dem entsprechenden SPS-Programm ist eine Fehlbedienung nahezu ausgeschlossen.
Bis zu 32 Achsen sind machbar
Für die Zugänglichkeit der Schweißbrenner an die Schweißnähte sorgen je nach Arbeitsaufgabe bis zu 14 Achsen: Zu den sechs Roboterachsen in der Standardausführung bieten Drehsockel und Gelenkachse zwei weitere Roboterachsen. Je nach Bedarf erhöhen weitere periphere Achsen die Zugänglichkeit der Schweißbrenner an die Schweißnähte in der Wannenlage: Dazu stehen Fahrbahnen in X- und Y-Richtung sowie Höhenfahrwerke zur Verfügung. Ist der L-Manipulator zusätzlich zur Dreh- und Kippachse noch mit einem Hubwerk ausgerüstet, ergibt sich die Summe von 14 programmierbaren Achsen. Aber auch damit ist die Robotersteuerung noch lange nicht ausgelastet. Sie kann bis zu 32 Achsen ansteuern.
Neben der Programmierung mit Hilfe des Programmierhandgeräts lassen sich die Bewegungen der Schweißdüse mühelos auch durchs Offline-Teachen programmieren.
Generell lassen sich IGM-Roboter für alle berührungsfreien Schweiß- und Schneidverfahren einsetzen. Je nach Material und Blechdicke werden die passenden Verfahren, wie beispielsweise WIG-Schweiß-, MIG-Löt-, Plasmalöt- und Plasmaschweißprozesse eingesetzt. In den überwiegenden Fällen sind es MIG/MAG Schweißprozesse. Die Jungheinrich-Werke in Moosburg setzen MAG-Schweißprozesse in unterschiedlichen Varianten ein: Sie reichen vom Einzeldraht- bis zum Tandem-Prozess, vom Baustahlschweißen bis zum Fügen von Feinkornstählen, die dank höherer Zugfestigkeit den Einsatz von Blechen geringerer Dicke ermöglichen. „Traditionell“, erläutert Peter Scheichenbauer, „arbeiten wir eng mit dem österreichischen Schweißmaschinenbauer Fronius zusammen. Die Sparte Perfect Welding gilt als weltweiter Technologieführer im Marktsegment der Lichtbogen-Schweißtechnik und als Marktführer in Europa.“
Die innovative Konstruktion der IGM-Roboter bietet gerade auch beim MAG-Schweißen in den bayerischen Jungheinrich-Werken Vorzüge: Alle fürs Schweißen notwendigen Medien werden zuerst durch die erste Achse und dann durch die Hohlwelle in der Handachse geführt. Auf diese Weise kann der Brenner zwei Umdrehungen vollziehen. Das bringt wesentliche Vorteile bei der Zugänglichkeit an engen Werkstücken sowie bei kreisförmigen Nähten.
Hubmasten aus der Roboterzelle
Die Fertigung von Hubmasten im Stammwerk erfolgt im Pendelbetrieb. Während die beiden Roboter beispielsweise in der linken Kabine arbeiten, wird hauptzeitparallel das nächste Schweißteil in den L-Manipulator eingespannt. Auch in der kürzlich nach Degernpoint gelieferten Schweißzelle arbeiten zwei IGM-Roboter Hand in Hand. Sie arbeiten jedoch in nur einer Kabine. Dort schweißen sie Hubmastschienen, die bis zu 7,50 m lang sind. Gemessen an der Schweißzeit sind die Rüstzeiten recht kurz, so dass sich eine zweite Kabine mit einem entsprechend großen L-Manipulator nicht rentieren würde. In dieser Roboterzelle bewegen sich die IGM-Roboter auf einer zehn Meter langen X-Achse mit Querfahrwerk (Y-Achse).
Die Schweißfertigung eines Fahrerplatzträgers ist knifflig, da die Fahrplatzträger aus Gründen der Gewichtsreduzierung aus unterschiedlichen Blechqualitäten bestehen. Das erfordert den Einsatz unterschiedlicher Schweißdrähte. Dort realisierte IGM eine Doppeldrahtführung zum automatischen Wechseln der Drahtqualitäten.
Die IGM-Roboterzelle, in der Schwingschubrahmen für Hochregalstapler geschweißt werden, rüstete IGM den Roboter so aus, dass er sowohl mit einem Singleschweißbrenner als auch mit einem Brenner fürs Tandemschweißen arbeiten kann.
„Bei diesem Bauteil“, erläutert Bernhard Petermaier, „sind große und lange Nähte zu schweißen. Gerade dort lohnt sich der Einsatz des Tandemschweißens. Durch dieses Verfahren konnten wir die Schweißzeit signifikant reduzieren. Auf die Schweißgeschwindigkeit bezogen, sind wir dort um etwa 70 Prozent schneller. Auch in dieser Roboterzelle schweißen wir unterschiedliche Blechqualitäten sowohl im Single- als auch im Tandem-Verfahren. Daher müssen die unterschiedlichen Schweißbrennern auch mit unterschiedlichen Drahtqualitäten versorgt werden.“
„Dazu“, erklärt Peter Scheichenbauer, „haben wir eine Sonderlösung der Zuführung von unterschiedlichen Drahtqualitäten aus sechs Drahtfässer erarbeitet. Am Roboter ist nur Platz für drei Drahtvorschubmotoren. An diese Vorschubmotoren werden alle sechs Drähte herangeführt. Zum Brennerwechsel, der dank Bajonettverschluss problemlos erfolgt, werden die aktuell geforderten Drähte manuell in die Vorschubmotoren eingeführt. Diese manuelle Prozedur“, betont Peter Scheichenbauer, „erfordert weniger Zeit als der Austausch der Drähte durch das ganze Zuführpaket.“
Dass IGM stets auf der Suche nach Verbesserungen ist, zeigt die neue Lösung für den automatisierten Wechsel vom Single- zu Tandem-Schweißen. „Dazu haben wir“, berichtet Peter Scheichenbauer, „ein neues Brennerwechselsystem entwickelt. Dabei wird nicht mehr das Schlauchpaket gemeinsam mit dem Brenner abgelegt. Bei der neuen Lösung gibt es nur noch ein Schlauchpaket, in dem zwei Drähte geführt werden. Das heißt, der Roboter, der zuvor die unterschiedlichen Schlauchpakete trägt, wird entlastet.“
Peter Springfeld